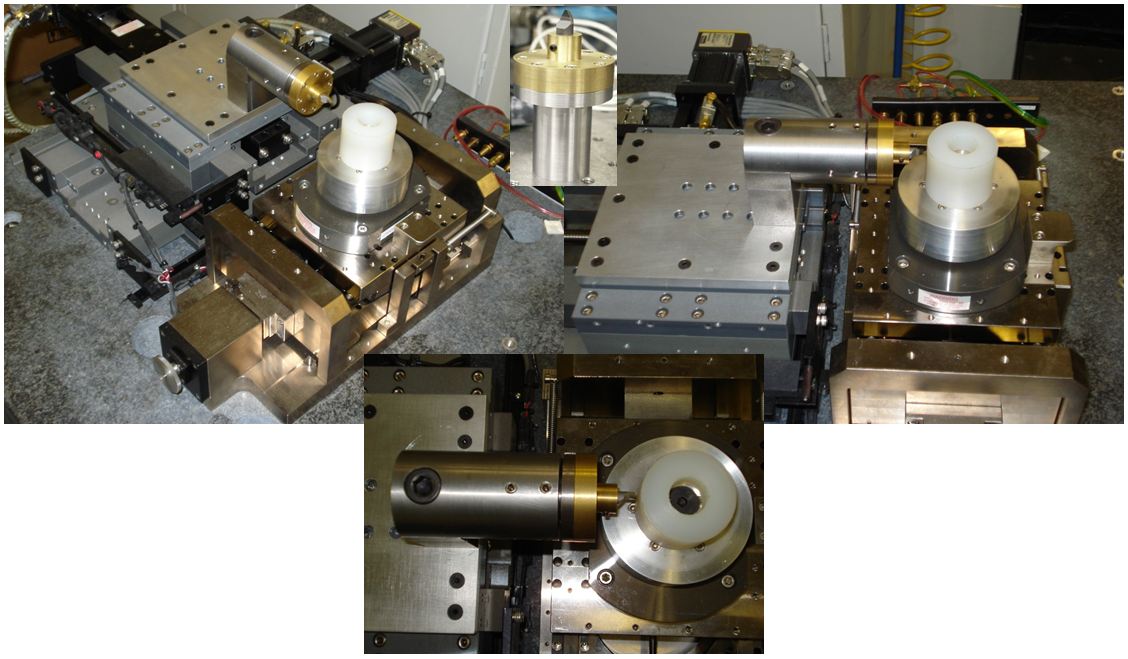
This research involves the design and control of a Dual Stage Fast Tool Servo (FTS) for precision machining of complex non-circular shapes. A piezoelectric actuator of 20 microns motion is integrated with an existing electromagnetic linear actuator. Feedforward and integrated feedback and repetitive digital control based on mu synthesis is designed and implemented for electromagnetic actuator in tracking complex engine piston profiles. An Iterative learning control scheme was also designed and implemented with the piezoelectric attachment in order to generate short mechanical pulses for machining surface textures.
Lin, Chi-Ying, 2008, Adaptive and Repetitive Control of a Fast Tool Servo for Precision
Motion Control. National Taiwan University of Science and Technology, Taipei, Taiwan